ປະເພດ, ການອອກແບບແລະຫຼັກການຂອງການດໍາເນີນງານຂອງກົນໄກການຊີ້ນໍາ
ເນື້ອໃນ
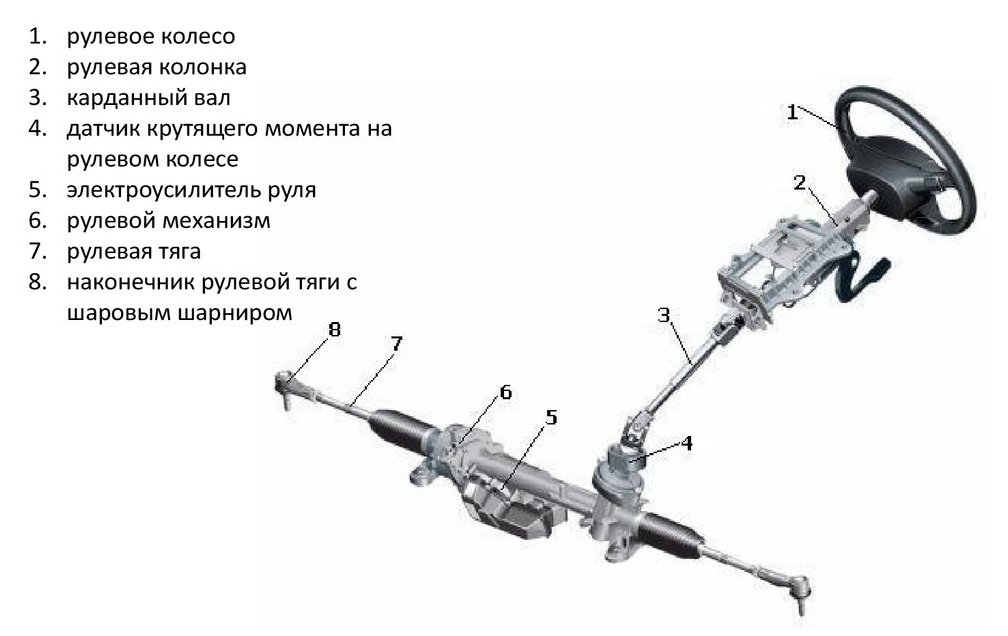
ການປ່ຽນທິດທາງການເຄື່ອນໄຫວຂອງລົດແມ່ນເຮັດໄດ້ໂດຍການຫັນພວງມາໄລໂດຍໃຊ້ພວງມາໄລ. ຢ່າງໃດກໍຕາມ, ລະຫວ່າງມັນແລະລໍ້ມີອຸປະກອນທີ່ປ່ຽນຜົນບັງຄັບໃຊ້ຂອງມືຂອງຜູ້ຂັບຂີ່ແລະທິດທາງຂອງມັນເພື່ອນໍາໃຊ້ຜົນບັງຄັບໃຊ້ໂດຍກົງກັບແຂນ swing. ມັນຖືກເອີ້ນວ່າກົນໄກການຊີ້ນໍາທົ່ວໄປ.

ຈຸດປະສົງຂອງກົນໄກການຊີ້ນໍາແມ່ນຫຍັງ?
ໃນໂຄງການຊີ້ນໍາທົ່ວໄປ, ກົນໄກປະຕິບັດຫນ້າທີ່ດັ່ງຕໍ່ໄປນີ້:
- converts ການຫມຸນຂອງ shaft ຂາເຂົ້າທີ່ຄໍລໍາພວງມາໄລໄດ້ຖືກເຊື່ອມຕໍ່ກັບພືດຫມູນວຽນການແປພາສາສໍາລັບ rods ເຊື່ອມຕໍ່ການຊີ້ນໍາ;
- ປະສານງານຜົນບັງຄັບໃຊ້ທີ່ຜູ້ຂັບຂີ່ສາມາດສ້າງໄດ້ດ້ວຍຜົນບັງຄັບໃຊ້ທີ່ກໍານົດໄວ້ໃນ levers ເຊື່ອມຕໍ່ກັບ knuckles ການຊີ້ນໍາຂອງ chassis, ການນໍາໃຊ້ລະບົບສາຍສົ່ງກົນຈັກທີ່ມີອັດຕາສ່ວນເກຍທີ່ແນ່ນອນທີ່ມີຢູ່ໃນການອອກແບບ;
- ໃນກໍລະນີຫຼາຍທີ່ສຸດ, ຮັບປະກັນການດໍາເນີນງານຮ່ວມກັນກັບການຊີ້ນໍາພະລັງງານ;
- ປົກປ້ອງມືຂອງຜູ້ຂັບຂີ່ຈາກຜົນກະທົບທາງກົງກັນຂ້າມຈາກຄວາມບໍ່ສະຫມໍ່າສະເຫມີຂອງຖະຫນົນ.
ມີລະດັບຄວາມຖືກຕ້ອງທີ່ແນ່ນອນ, ອຸປະກອນນີ້ສາມາດຖືວ່າເປັນເຄື່ອງເກຍ, ຍ້ອນວ່າມັນຖືກເອີ້ນເລື້ອຍໆ.
ປະເພດຂອງກົນໄກການຊີ້ນໍາ
ມີສາມແບບເກຍທີ່ນິຍົມຫຼາຍທີ່ສຸດ:
- worm-roller;
- rack ແລະ pinion;
- ປະເພດ " screw-ball nut".
ພວກເຂົາແຕ່ລະມີຄວາມໄດ້ປຽບຂອງຕົນເອງແລະພື້ນທີ່ຂອງການນໍາໃຊ້.
ກົນໄກປະເພດລູກກອກ
ປະເພດນີ້ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອະດີດໃນລົດທັງຫມົດ, ແຕ່ໃນປັດຈຸບັນມີຈໍາກັດການນໍາໃຊ້ເນື່ອງຈາກຂໍ້ເສຍປຽບຫຼາຍໃນການປຽບທຽບກັບໂຄງການອື່ນໆ.
ຫຼັກການຂອງການດໍາເນີນງານຂອງກ່ອງເກຍແມ່ທ້ອງແມ່ນການມ້ວນເຄື່ອງເກຍຂອງຂະແຫນງການທີ່ມີລໍ້ແມ່ທ້ອງກ້ຽວວຽນກ່ຽວກັບ shaft ຖັນການຊີ້ນໍາ. ແກນປ້ອນຂໍ້ມູນຂອງກ່ອງເກຍແມ່ນເຮັດເປັນຊິ້ນດຽວທີ່ມີເສັ້ນດ້າຍຕົວແປຂອງລັດສະໝີທີ່ປ່ຽນແປງໄດ້, ແລະສໍາລັບການເຊື່ອມຕໍ່ກັບແກນຄໍລໍາ, ມັນຖືກຕິດຕັ້ງດ້ວຍຕົວເຊື່ອມຕໍ່ splined ຫຼື wedge. ຂະແຫນງການ toothed ຂອງ roller ແມ່ນຕັ້ງຢູ່ເທິງ shaft ຜົນຜະລິດກັບ bipod ໄດ້, ການຊ່ວຍເຫຼືອຂອງ gearbox ແມ່ນເຊື່ອມຕໍ່ກັບ rods ເຊື່ອມຕໍ່ການຊີ້ນໍາ.

ໂຄງປະກອບການທັງຫມົດແມ່ນຖືກຈັດໃສ່ຢູ່ໃນເຮືອນທີ່ແຂງ, ເອີ້ນວ່າ crankcase ເນື່ອງຈາກການມີນ້ໍາຫລໍ່ລື່ນຢູ່ໃນມັນ. ນີ້ປົກກະຕິແລ້ວແມ່ນນ້ໍາມັນປະເພດສົ່ງຂອງແຫຼວ. shaft ອອກຈາກ crankcase ແມ່ນປະທັບຕາດ້ວຍປະທັບຕານ້ໍາມັນ. crankcase ແມ່ນ bolted ກັບກອບຫຼື bulkhead ເຄື່ອງຈັກຂອງຮ່າງກາຍ.
ການຫມູນວຽນຂອງແກນປ້ອນຂໍ້ມູນໃນກະເປົ໋າເກຍແມ່ນປ່ຽນເປັນຫມຸນຫມຸນ - ແປຂອງປາຍບານຂອງ bipod. Rods ສໍາລັບລໍ້ແລະ levers trapezoid ເພີ່ມເຕີມແມ່ນຍັງຕິດກັບມັນ.
ກົນໄກແມ່ນສາມາດສົ່ງກໍາລັງທີ່ສໍາຄັນແລະຂ້ອນຂ້າງຫນາແຫນ້ນຢູ່ໃນອັດຕາສ່ວນເກຍໃຫຍ່. ແຕ່ໃນເວລາດຽວກັນ, ມັນເປັນການຍາກທີ່ຈະຈັດການຄວບຄຸມທີ່ມີ backlash ຫນ້ອຍແລະ friction ຕ່ໍາ. ເພາະສະນັ້ນຂອບເຂດຂອງຄໍາຮ້ອງສະຫມັກ - ລົດບັນທຸກແລະ SUVs, ສ່ວນໃຫຍ່ແມ່ນການອອກແບບແບບອະນຸລັກ.
ຊັ້ນວາງພວງມາໄລ
ກົນໄກການນໍາໃຊ້ຢ່າງກວ້າງຂວາງທີ່ສຸດສໍາລັບລົດໂດຍສານ. ການຊີ້ນໍາ rack ແລະ pinion ເຮັດວຽກຢ່າງຖືກຕ້ອງຫຼາຍ, ສະຫນອງຄວາມຄິດເຫັນທີ່ດີແລະເຫມາະກັບລົດ.
ກົນໄກການ rack ແລະ pinion ປະກອບດ້ວຍ:
- ທີ່ຢູ່ອາໄສທີ່ມີ fastening ກັບ bulkhead ຮ່າງກາຍ;
- ເປັນ toothed rack resting ສຸດ bearings ວາລະສານ;
- drive gear ເຊື່ອມຕໍ່ກັບ shaft ຂາເຂົ້າ;
- ກົນໄກ thrust ທີ່ຮັບປະກັນການເກັບກູ້ຫນ້ອຍທີ່ສຸດລະຫວ່າງເກຍແລະ rack.

ການເຊື່ອມຕໍ່ກົນຈັກຜົນຜະລິດຂອງ rack ແມ່ນເຊື່ອມຕໍ່ກັບຂໍ້ຕໍ່ລູກຂອງ rods ການຊີ້ນໍາ, ເຊິ່ງເຮັດວຽກໂດຍຜ່ານຄໍາແນະນໍາໂດຍກົງກັບ swing ແຂນ. ການອອກແບບນີ້ແມ່ນເບົາກວ່າແລະຫນາແຫນ້ນກວ່າການເຊື່ອມໂຍງການຊີ້ນໍາຂອງກ່ອງເກຍແມ່ທ້ອງ. ນີ້ແມ່ນບ່ອນທີ່ການຄວບຄຸມຄວາມແມ່ນຍໍາສູງມາຈາກ. ນອກຈາກນັ້ນ, ການເກັບກູ້ pinion ແມ່ນມີຄວາມຊັດເຈນແລະມີຄວາມຫມັ້ນຄົງຫຼາຍກ່ວາຮູບຮ່າງຂອງ roller ແລະແມ່ທ້ອງທີ່ສັບສົນ. ແລະຄໍາຄຶດຄໍາເຫັນທີ່ເພີ່ມຂຶ້ນຕໍ່ກັບພວງມາໄລແມ່ນໄດ້ຮັບການຊົດເຊີຍໂດຍເຄື່ອງຂະຫຍາຍສຽງແລະເຄື່ອງ dampers ທີ່ທັນສະໄຫມ.
Screw ຫມາກບານ
ກ່ອງເກຍດັ່ງກ່າວແມ່ນຄ້າຍຄືກັບກ່ອງເກຍແມ່ທ້ອງ, ແຕ່ອົງປະກອບທີ່ສໍາຄັນໄດ້ຖືກນໍາສະເຫນີໃນມັນໃນຮູບແບບຂອງພາກສ່ວນຂອງ rack ທີ່ມີຂະແຫນງການເກຍ, ເຄື່ອນຍ້າຍຕາມສະກູ shaft ຂາເຂົ້າໂດຍຜ່ານບານໂລຫະ circulating. ຂະແຫນງ rack ແມ່ນເຊື່ອມຕໍ່ກັບແຂ້ວເທິງ shaft bipod.
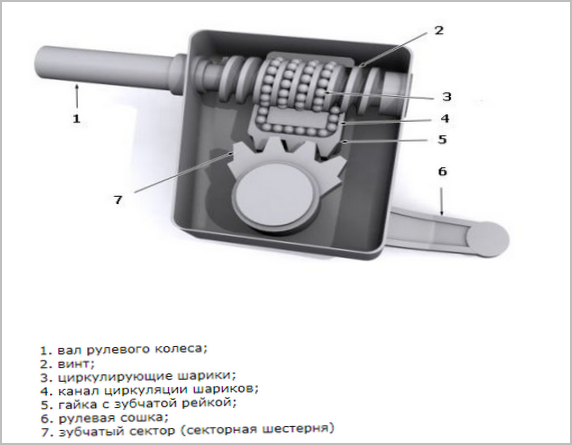
ໂດຍການນໍາໃຊ້ rack ສັ້ນ, ເຊິ່ງຕົວຈິງແລ້ວແມ່ນຫມາກແຫ້ງເປືອກແຂງທີ່ມີບານຕາມເສັ້ນດ້າຍ, friction ແມ່ນຫຼຸດລົງຢ່າງຫຼວງຫຼາຍພາຍໃຕ້ການໂຫຼດສູງ. ແລະນີ້ແມ່ນສິ່ງທີ່ແນ່ນອນທີ່ໄດ້ກາຍເປັນປັດໃຈກໍານົດໃນເວລາທີ່ນໍາໃຊ້ກົນໄກໃນລົດບັນທຸກຫນັກແລະຍານພາຫະນະທີ່ຄ້າຍຄືກັນອື່ນໆ. ໃນເວລາດຽວກັນ, ຄວາມແມ່ນຍໍາແລະການເກັບກູ້ຫນ້ອຍແມ່ນຮັກສາໄວ້, ເນື່ອງຈາກການເຫຼົ່ານີ້ເກຍເກຍດຽວກັນໄດ້ພົບເຫັນການນໍາໃຊ້ໃນລົດໂດຍສານຊັ້ນນໍາຂະຫນາດໃຫຍ່.
ຊ່ອງຫວ່າງແລະ friction ໃນກົນໄກການຊີ້ນໍາ
ກ່ອງເກຍທັງໝົດຕ້ອງການການປັບປ່ຽນເປັນໄລຍະເພື່ອປ່ຽນລະດັບຕ່າງໆ. ເນື່ອງຈາກການສວມໃສ່, ຊ່ອງຫວ່າງໃນຂໍ້ຕໍ່ຂອງເກຍຈະປ່ຽນແປງ, ແລະການຫຼິ້ນຈະປາກົດຢູ່ໃນພວງມາໄລ, ພາຍໃນລົດແມ່ນບໍ່ສາມາດຄວບຄຸມໄດ້.
ເຄື່ອງມືແມ່ທ້ອງຖືກຄວບຄຸມໂດຍການຍ້າຍພາກສ່ວນເກຍໄປໃນທິດທາງທີ່ຕັ້ງຂວາງກັບ shaft ຂາເຂົ້າ. ມັນເປັນການຍາກທີ່ຈະຮັບປະກັນການຮັກສາການເກັບກູ້ໃນທຸກມຸມຂອງການຫມຸນຂອງພວງມາໄລ, ນັບຕັ້ງແຕ່ການສວມໃສ່ເກີດຂຶ້ນໃນອັດຕາທີ່ແຕກຕ່າງກັນໃນທິດທາງທີ່ໃຊ້ເລື້ອຍໆຂອງການເຄື່ອນໄຫວຊື່ແລະຫຼາຍບໍ່ຄ່ອຍໃນເວລາທີ່ຫັນໃນມຸມທີ່ແຕກຕ່າງກັນ. ນີ້ແມ່ນບັນຫາທົ່ວໄປໃນທຸກກົນໄກ; racks ຍັງໃສ່ບໍ່ສະຫມໍ່າສະເຫມີ. ຖ້າມີການສວມໃສ່ຢ່າງຮ້າຍແຮງ, ຊິ້ນສ່ວນຕ່າງໆຕ້ອງໄດ້ຮັບການປ່ຽນແທນ, ຖ້າບໍ່ດັ່ງນັ້ນເມື່ອພວງມາໄລ rotates, ຊ່ອງຫວ່າງຈະກາຍເປັນການແຊກແຊງກັບ friction ເພີ່ມຂຶ້ນ, ເຊິ່ງບໍ່ເປັນອັນຕະລາຍຫນ້ອຍ.
