ລະບົບກັນສັ່ນເອເລັກໂຕຣນິກ (ESP, AHS, DSC, PSM, VDC, VSC)
 ລະບົບເຫຼົ່ານີ້ຮັບປະກັນວ່າພາຫະນະປະພຶດຕົວຢ່າງປອດໄພໃນສະຖານະການທີ່ ສຳ ຄັນ, ໂດຍສະເພາະເມື່ອເຂົ້າທາງ. ໃນລະຫວ່າງການເຄື່ອນໄຫວ, ລະບົບຕ່າງ evaluate ປະເມີນຕົວຊີ້ວັດຫຼາຍຢ່າງ, ເຊັ່ນ: ຄວາມໄວຫຼືການrotationູນວຽນຂອງພວງມາໄລ, ແລະໃນກໍລະນີທີ່ມີຄວາມສ່ຽງຂອງການເລື່ອນລໍ້, ລະບົບຕ່າງ can ສາມາດສົ່ງລົດກັບຄືນສູ່ທິດທາງເດີມໄດ້ໂດຍການຫ້າມລໍ້ແຕ່ລະລໍ້. ໃນພາຫະນະທີ່ມີລາຄາແພງກວ່າ, ລະບົບຄວບຄຸມຄວາມstabilityັ້ນຄົງຍັງມີໂຄງຮ່າງທີ່ມີການເຄື່ອນໄຫວທີ່ປັບຕົວເຂົ້າກັບພື້ນຜິວແລະຮູບແບບການຂັບຂີ່ແລະປະກອບສ່ວນເຂົ້າໃນຄວາມປອດໄພໃນການຂັບຂີ່ຕື່ມອີກ. ລົດສ່ວນໃຫຍ່ໃຊ້ລະບົບເຄື່ອງonາຍໃສ່ຍານພາຫະນະຂອງຕົນ. ESP (Mercedes-Benz, Skoda, VW, Peugeot ແລະອື່ນ others). ດ້ວຍເຄື່ອງາຍ AHS (ລະບົບການປຸງແຕ່ງທີ່ມີການເຄື່ອນໄຫວ) ໃຊ້ໂດຍ Chevrolet ໃນພາຫະນະຂອງເຂົາເຈົ້າ, DSC (ການຄວບຄຸມຄວາມປອດໄພແບບເຄື່ອນໄຫວBMW, PSM (ລະບົບການຄຸ້ມຄອງສະຖຽນລະພາບຂອງ Porsche), ວີດີຊີ (ການຄວບຄຸມນະໂຍບາຍດ້ານພາຫະນະ) ຖືກຕິດຕັ້ງໃສ່ລົດ Subaru, VSC (ການຄວບຄຸມສະຖຽນລະພາບຍານພາຫະນະ) ຍັງຖືກຕິດຕັ້ງໃສ່ລົດ Subaru ຄືກັນກັບລົດ Lexus.
ລະບົບເຫຼົ່ານີ້ຮັບປະກັນວ່າພາຫະນະປະພຶດຕົວຢ່າງປອດໄພໃນສະຖານະການທີ່ ສຳ ຄັນ, ໂດຍສະເພາະເມື່ອເຂົ້າທາງ. ໃນລະຫວ່າງການເຄື່ອນໄຫວ, ລະບົບຕ່າງ evaluate ປະເມີນຕົວຊີ້ວັດຫຼາຍຢ່າງ, ເຊັ່ນ: ຄວາມໄວຫຼືການrotationູນວຽນຂອງພວງມາໄລ, ແລະໃນກໍລະນີທີ່ມີຄວາມສ່ຽງຂອງການເລື່ອນລໍ້, ລະບົບຕ່າງ can ສາມາດສົ່ງລົດກັບຄືນສູ່ທິດທາງເດີມໄດ້ໂດຍການຫ້າມລໍ້ແຕ່ລະລໍ້. ໃນພາຫະນະທີ່ມີລາຄາແພງກວ່າ, ລະບົບຄວບຄຸມຄວາມstabilityັ້ນຄົງຍັງມີໂຄງຮ່າງທີ່ມີການເຄື່ອນໄຫວທີ່ປັບຕົວເຂົ້າກັບພື້ນຜິວແລະຮູບແບບການຂັບຂີ່ແລະປະກອບສ່ວນເຂົ້າໃນຄວາມປອດໄພໃນການຂັບຂີ່ຕື່ມອີກ. ລົດສ່ວນໃຫຍ່ໃຊ້ລະບົບເຄື່ອງonາຍໃສ່ຍານພາຫະນະຂອງຕົນ. ESP (Mercedes-Benz, Skoda, VW, Peugeot ແລະອື່ນ others). ດ້ວຍເຄື່ອງາຍ AHS (ລະບົບການປຸງແຕ່ງທີ່ມີການເຄື່ອນໄຫວ) ໃຊ້ໂດຍ Chevrolet ໃນພາຫະນະຂອງເຂົາເຈົ້າ, DSC (ການຄວບຄຸມຄວາມປອດໄພແບບເຄື່ອນໄຫວBMW, PSM (ລະບົບການຄຸ້ມຄອງສະຖຽນລະພາບຂອງ Porsche), ວີດີຊີ (ການຄວບຄຸມນະໂຍບາຍດ້ານພາຫະນະ) ຖືກຕິດຕັ້ງໃສ່ລົດ Subaru, VSC (ການຄວບຄຸມສະຖຽນລະພາບຍານພາຫະນະ) ຍັງຖືກຕິດຕັ້ງໃສ່ລົດ Subaru ຄືກັນກັບລົດ Lexus.
ຕົວຫຍໍ້ ESP ມາຈາກພາສາອັງກິດ ໂຄງການສະຖຽນລະພາບທາງເອເລັກໂຕຣນິກ ແລະstandsາຍເຖິງໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ. ຈາກຊື່ຕົວມັນເອງ, ມັນເປັນທີ່ຈະແຈ້ງວ່ານີ້ແມ່ນຕົວແທນຂອງຜູ້ຊ່ວຍຂັບເອເລັກໂຕຣນິກໃນແງ່ຂອງຄວາມັ້ນຄົງໃນການຂັບຂີ່. ການຄົ້ນພົບແລະການຈັດຕັ້ງປະຕິບັດຕໍ່ໄປຂອງ ESP ແມ່ນຄວາມກ້າວ ໜ້າ ໃນອຸດສາຫະ ກຳ ລົດຍົນ. ສະຖານະການທີ່ຄ້າຍຄືກັນນີ້ເກີດຂຶ້ນຄັ້ງດຽວກັບການແນະນໍາ ABS. ESP ຊ່ວຍໃຫ້ຜູ້ຂັບຂີ່ທີ່ບໍ່ມີປະສົບການແລະມີປະສົບການສູງຮັບມືກັບສະຖານະການອັນ ສຳ ຄັນບາງຢ່າງທີ່ອາດຈະເກີດຂຶ້ນໃນຂະນະຂັບຂີ່. ເຊັນເຊີ ຈຳ ນວນ ໜຶ່ງ ຢູ່ໃນລົດບັນທຶກຂໍ້ມູນການຂັບຂີ່ໃນປະຈຸບັນ. ຂໍ້ມູນນີ້ຖືກປຽບທຽບຜ່ານ ໜ່ວຍ ຄວບຄຸມດ້ວຍຂໍ້ມູນທີ່ຄໍານວນແລ້ວສໍາລັບຮູບແບບການຂັບຂີ່ທີ່ຖືກຕ້ອງ. ເມື່ອກວດພົບຄວາມແຕກຕ່າງ, ESP ຈະຖືກເປີດ ນຳ ໃຊ້ໂດຍອັດຕະໂນມັດແລະເຮັດໃຫ້ພາຫະນະizesັ້ນຄົງ. ESP ໃຊ້ລະບົບໂຄງຮ່າງເອເລັກໂຕຣນິກອື່ນ for ສໍາລັບການທໍາງານຂອງມັນ. ພະນັກງານເອເລັກໂຕຣນິກທີ່ສໍາຄັນທີ່ສຸດລວມມີລະບົບຫ້າມລໍ້ຫ້າມລໍ້ ABS, ລະບົບປ້ອງກັນການເລື່ອນ (ASR, TCS ແລະອື່ນ others) ແລະຄໍາແນະນໍາກ່ຽວກັບການເຮັດວຽກຂອງເຊັນເຊີ ESP ທີ່ຈໍາເປັນ.
ລະບົບດັ່ງກ່າວໄດ້ພັດທະນາໂດຍວິສະວະກອນຈາກ Bosch ແລະ Mercedes. ລົດຄັນ ທຳ ອິດທີ່ຕິດຕັ້ງ ESP ແມ່ນ S 1995 ລົດຕູ້ (C 600) ໃນເດືອນມີນາ 140. ສອງສາມເດືອນຕໍ່ມາ, ລະບົບຍັງໄດ້ໄປສູ່ S-Class (W 140) ແລະ SL Roadster (R 129). ລາຄາຂອງລະບົບນີ້ແມ່ນສູງຫຼາຍເຊິ່ງໃນຕອນທໍາອິດລະບົບດັ່ງກ່າວເປັນພຽງມາດຕະຖານປະສົມປະສານກັບເຄື່ອງຈັກສິບສອງເຄື່ອງ 6,0 V12 ເທິງສຸດ, ສໍາລັບເຄື່ອງຈັກ ESP ອື່ນ it ມັນໄດ້ຖືກສະ ເໜີ ໃຫ້ພຽງແຕ່ສໍາລັບການເກັບຄ່າບໍລິການທີ່ຫຼາຍ. ການຂະຫຍາຍຕົວທີ່ແທ້ຈິງໃນ ESP ແມ່ນເນື່ອງມາຈາກສິ່ງທີ່ເບິ່ງຄືວ່າເລັກນ້ອຍແລະໃນທາງທີ່ເປັນຄວາມບັງເອີນ. ໃນປີ 1997, ນັກຂ່າວຊາວສວີເດນໄດ້ດໍາເນີນການທົດສອບຄວາມstabilityັ້ນຄົງສໍາລັບຄວາມແປກໃthen່, ເຊິ່ງແມ່ນ Mercedes A. ເພື່ອຄວາມແປກໃຈອັນຍິ່ງໃຫຍ່ຂອງທຸກຄົນໃນປະຈຸບັນ, Mercedes A ບໍ່ສາມາດຮັບມືກັບອັນທີ່ເອີ້ນວ່າການທົດສອບງູ. ອັນນີ້ເປັນຈຸດເລີ່ມຕົ້ນຂອງທຸລະກິດທີ່ບັງຄັບໃຫ້ຜູ້ຜະລິດຢຸດການຜະລິດເປັນເວລາສັ້ນ. ຄວາມພະຍາຍາມຂອງນັກວິຊາການແລະນັກອອກແບບຢູ່ທີ່ໂຮງງານຜະລິດລົດຍົນ Stuttgart ເພື່ອຊອກຫາວິທີແກ້ໄຂບັນຫາທີ່ຖືກຕ້ອງໄດ້ປະສົບຜົນສໍາເລັດ. ອີງຕາມການທົດສອບຈໍານວນຫຼາຍ, ESP ກາຍເປັນສ່ວນມາດຕະຖານຂອງ Mercedes A. ອັນນີ້meantາຍເຖິງການເພີ່ມການຜະລິດຂອງລະບົບນີ້ຈາກທີ່ຄາດໄວ້ຫຼາຍສິບພັນຫາຫຼາຍຮ້ອຍພັນ, ແລະລາຄາທີ່ເaffordableາະສົມກວ່າສາມາດບັນລຸໄດ້. ESP ໄດ້ປູທາງສໍາລັບການນໍາໃຊ້ລົດຂະ ໜາດ ກາງແລະຂະ ໜາດ ນ້ອຍ. ການເກີດຂອງ ESP ແມ່ນການປະຕິວັດທີ່ແທ້ຈິງໃນດ້ານການຂັບຂີ່ທີ່ປອດໄພ, ແລະທຸກມື້ນີ້ມັນຂ້ອນຂ້າງແຜ່ຫຼາຍບໍ່ພຽງແຕ່ຍ້ອນ Mercedes-Benz. ການມີຢູ່ຂອງ ESP, ເຊິ່ງກໍາລັງພັດທະນາແລະປະຈຸບັນເປັນຜູ້ຜະລິດລາຍໃຫຍ່ທີ່ສຸດຂອງມັນ, ປະກອບສ່ວນຫຼາຍອັນໃຫ້ກັບການມີຢູ່ຂອງ ESP.
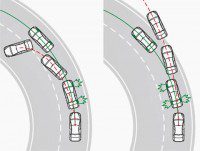
ໃນລະບົບເອເລັກໂຕຣນິກສ່ວນໃຫຍ່, ສະຫມອງແມ່ນຫນ່ວຍຄວບຄຸມເອເລັກໂຕຣນິກ, ແລະນີ້ບໍ່ແມ່ນກໍລະນີຂອງ ESP. ວຽກງານຂອງຫນ່ວຍຄວບຄຸມແມ່ນເພື່ອປຽບທຽບຄ່າທີ່ແທ້ຈິງຈາກເຊັນເຊີກັບຄ່າທີ່ຄິດໄລ່ໃນຂະນະທີ່ຂັບລົດ. ທິດທາງທີ່ກໍານົດໄວ້ແມ່ນຖືກກໍານົດໂດຍມຸມຂອງການຫມຸນແລະຄວາມໄວຂອງການຫມຸນຂອງລໍ້. ເງື່ອນໄຂການຂັບຂີ່ຕົວຈິງແມ່ນຄິດໄລ່ໂດຍອີງໃສ່ການເລັ່ງຂ້າງຄຽງແລະການຫມຸນຂອງຍານພາຫະນະປະມານແກນຕັ້ງຂອງມັນ. ຖ້າມີການກວດພົບຄວາມແຕກຕ່າງຈາກຄ່າທີ່ຄິດໄລ່, ຂະບວນການສະຖຽນລະພາບແມ່ນເປີດໃຊ້. ການດໍາເນີນງານ ESP ຄວບຄຸມແຮງບິດຂອງເຄື່ອງຈັກແລະຜົນກະທົບຕໍ່ລະບົບເບກຂອງຫນຶ່ງຫຼືຫຼາຍລໍ້, ດັ່ງນັ້ນການກໍາຈັດການເຄື່ອນໄຫວຂອງຍານພາຫະນະທີ່ບໍ່ຕ້ອງການ. ESP ສາມາດແກ້ໄຂ understeer ແລະ oversteer ໃນເວລາທີ່ cornering. understeer ຍານພາຫະນະຖືກແກ້ໄຂໂດຍການເບກລໍ້ພາຍໃນຫລັງ. Oversteer ຖືກແກ້ໄຂໂດຍການເບກລໍ້ດ້ານນອກດ້ານຫນ້າ. ເມື່ອເບຣກລໍ້ທີ່ໃຫ້ມາ, ກໍາລັງເບຣກຈະຖືກສ້າງຂຶ້ນໃນລໍ້ນັ້ນໃນລະຫວ່າງການສະຖຽນລະພາບ. ອີງຕາມກົດຫມາຍທີ່ງ່າຍດາຍຂອງຟີຊິກ, ກໍາລັງເບກເຫຼົ່ານີ້ສ້າງແຮງບິດປະມານແກນຕັ້ງຂອງຍານພາຫະນະ. ແຮງບິດທີ່ໄດ້ຮັບຜົນສະເຫມີ counteracts ການເຄື່ອນໄຫວທີ່ບໍ່ຕ້ອງການແລະດັ່ງນັ້ນຈຶ່ງກັບຄືນຍານພາຫະນະໃນທິດທາງທີ່ຕ້ອງການໃນເວລາທີ່ cornering. ມັນຍັງເຮັດໃຫ້ລົດໃນທິດທາງທີ່ຖືກຕ້ອງໃນເວລາທີ່ບໍ່ໄດ້ລ້ຽວ. ຕົວຢ່າງຂອງການປະຕິບັດການ ESP ແມ່ນການຫັນມຸມໄວເມື່ອແກນທາງຫນ້າອອກຈາກມຸມຢ່າງໄວວາ. ESP ທໍາອິດຫຼຸດຜ່ອນແຮງບິດຂອງເຄື່ອງຈັກ. ຖ້າການປະຕິບັດນີ້ບໍ່ພຽງພໍ, ລໍ້ພາຍໃນດ້ານຫລັງຈະຖືກເບກ. ຂະບວນການສະຖຽນລະພາບຍັງສືບຕໍ່ຈົນກ່ວາແນວໂນ້ມທີ່ຈະ skid ຫຼຸດລົງ.
ESP ແມ່ນອີງໃສ່ ໜ່ວຍ ຄວບຄຸມທີ່ມີທົ່ວໄປຕໍ່ກັບ ABS ແລະລະບົບເອເລັກໂຕຣນິກອື່ນ such ເຊັ່ນ: ຕົວຈໍາ ໜ່າຍ ເຄື່ອງຫ້າມລໍ້ EBV / EBD, ລະບົບຄວບຄຸມແຮງບິດຂອງເຄື່ອງຈັກ (MSR) ແລະລະບົບປ້ອງກັນການຫຼົ້ມ (EDS, ASR ແລະ TCS). ໜ່ວຍ ຄວບຄຸມປະມວນຜົນຂໍ້ມູນ 143 ເທື່ອຕໍ່ວິນາທີ, ນັ້ນແມ່ນທຸກ every 7 ມິນລິວິນາທີ, ເຊິ່ງໄວກວ່າມະນຸດເກືອບ 30 ເທົ່າ. ESP ຕ້ອງການເຊັນເຊີຫຼາຍອັນເພື່ອໃຊ້ງານເຊັ່ນ:
- ເຊັນເຊີກວດຈັບເບຣກ (ແຈ້ງ ໜ່ວຍ ຄວບຄຸມທີ່ຄົນຂັບ ກຳ ລັງເບຣກ),
- ເຊັນເຊີຄວາມໄວ ສຳ ລັບລໍ້ສ່ວນຕົວ,
- ເຊັນເຊີມຸມພວງມາໄລ (ກໍານົດທິດທາງການເດີນທາງທີ່ຕ້ອງການ),
- ເຊັນເຊີເລັ່ງດ້ານຂ້າງ (ລົງທະບຽນຄວາມແຮງຂອງກໍາລັງຂ້າງຕົວຂອງຕົວກະຕຸ້ນ, ເຊັ່ນ: ແຮງ centrifugal ຢູ່ທາງໂຄ້ງ),
- ເຊັນເຊີrotationູນວຽນຍານພາຫະນະອ້ອມແກນຕັ້ງ (ເພື່ອປະເມີນການofູນວຽນຂອງຍານພາຫະນະອ້ອມແກນຕັ້ງແລະ ກຳ ນົດສະພາບການເຄື່ອນໄຫວໃນປະຈຸບັນ),
- ເຊັນເຊີຄວາມດັນເບຣກ (ກຳ ນົດຄວາມດັນປັດຈຸບັນຢູ່ໃນລະບົບເບຣກ, ຈາກການບັງຄັບຫ້າມລໍ້ແລະດັ່ງນັ້ນ, ກຳ ລັງຕາມລວງຍາວທີ່ປະຕິບັດຕໍ່ກັບລົດສາມາດຄິດໄລ່ໄດ້),
- ເຊັນເຊີເລັ່ງຄວາມຍາວ (ສຳ ລັບລົດຂັບສີ່ລໍ້ເທົ່ານັ້ນ).
ນອກຈາກນັ້ນ, ລະບົບຫ້າມລໍ້ຕ້ອງການອຸປະກອນຄວາມກົດດັນເພີ່ມເຕີມທີ່ໃຊ້ຄວາມກົດດັນເມື່ອຜູ້ຂັບຂີ່ບໍ່ໄດ້ເບກ. ຫົວ ໜ່ວຍ ໄຮໂດຼລິກແຈກຢາຍຄວາມກົດດັນເບຣກໃຫ້ກັບລໍ້ເບກ. ສະວິດໄຟເບຣກຖືກອອກແບບມາເພື່ອເປີດໄຟຫ້າມລໍ້ຖ້າຜູ້ຂັບຂີ່ບໍ່ໄດ້ເບກເມື່ອລະບົບ ESP ເປີດຢູ່. ບາງຄັ້ງ ESP ສາມາດຖືກປິດການ ນຳ ໃຊ້ດ້ວຍປຸ່ມຢູ່ເທິງ dashboard, ເຊິ່ງສະດວກ, ຍົກຕົວຢ່າງ, ເມື່ອຂັບລົດດ້ວຍຫິມະ. ການປິດຫຼືເປີດລະບົບແມ່ນຊີ້ບອກໂດຍຕົວຊີ້ວັດທີ່ມີແສງຢູ່ເທິງແຜງເຄື່ອງມື.
ESP ຊ່ວຍໃຫ້ເຈົ້າກົດດັນຂອບເຂດຂອງກົດofາຍຟິຊິກສາດແລະເຮັດໃຫ້ມີຄວາມປອດໄພຫຼາຍຂຶ້ນ. ຖ້າລົດທັງwereົດໄດ້ຮັບການຕິດຕັ້ງ ESP, ປະມານ ໜຶ່ງ ສ່ວນສິບຂອງອຸບັດຕິເຫດສາມາດຫຼີກລ່ຽງໄດ້. ລະບົບກວດກາຄວາມstabilityັ້ນຄົງຢູ່ສະເifີຖ້າບໍ່ປິດ. ດັ່ງນັ້ນ, ຜູ້ຂັບຂີ່ມີຄວາມຮູ້ສຶກປອດໄພຫຼາຍຂຶ້ນ, ໂດຍສະເພາະຢູ່ຖະ ໜົນ ທີ່ ໜາວ ແລະມີຫິມະ. ເນື່ອງຈາກ ESP ແກ້ໄຂທິດທາງການເດີນທາງໄປໃນທິດທາງທີ່ຕ້ອງການແລະຊົດເຊີຍຄວາມບ່ຽງເບນທີ່ເກີດຈາກການຂ້າມທາງ, ມັນຫຼຸດຜ່ອນຄວາມສ່ຽງຂອງອຸບັດຕິເຫດໃນສະຖານະການທີ່ສໍາຄັນໄດ້ຢ່າງຫຼວງຫຼາຍ. ແນວໃດກໍ່ຕາມ, ມັນຄວນຈະຖືກເນັ້ນ ໜັກ ໃນລົມຫາຍໃຈດຽວວ່າແມ້ແຕ່ ESP ທີ່ທັນສະໄ most ທີ່ສຸດຈະບໍ່ຊ່ວຍປະຢັດຜູ້ຂັບລົດແບບຊະຊາຍທີ່ບໍ່ປະຕິບັດຕາມກົດofາຍຂອງຟິຊິກສາດ.
ເນື່ອງຈາກ ESP ເປັນເຄື່ອງtraາຍການຄ້າຂອງ BOSCH ແລະ Mercedes, ຜູ້ຜະລິດອື່ນ either ກໍ່ໃຊ້ລະບົບ Bosch ແລະຊື່ ESP, ຫຼືໄດ້ພັດທະນາລະບົບຂອງຕົນເອງແລະໃຊ້ຕົວຫຍໍ້ທີ່ແຕກຕ່າງ (ຂອງຕົນເອງ).
Acura–Honda: ການຄວບຄຸມຄວາມສະຖຽນຂອງຍານພາຫະນະ (VSA)
Alfa Romeo: ການຄວບຄຸມພາຫະນະແບບເຄື່ອນໄຫວ (VDC)
Audi: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Bentley: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
BMW: ຄວບຄຸມການຂັບເຄື່ອນແບບໄດນາມິກ DSC
Bugatti: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ສະຖານທີ່: StabiliTrak
Cadillac: StabiliTrak ແລະພວງມາໄລດ້ານ ໜ້າ (AFS)
ລົດ Chery: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ
Chevrolet: StabiliTrak; ການຈັດການທີ່ມີການເຄື່ອນໄຫວ (Lin Corvette)
Chrysler: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Citroën: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Dodge: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Daimler: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Fiat: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP) ແລະການຄວບຄຸມການເຄື່ອນທີ່ຂອງພາຫະນະ (VDC)
Ferrari: ສ້າງຕັ້ງການຄວບຄຸມ (CST)
Ford: AdvanceTrac with Roll Over Stability Control (RSC), Interactive Vehicle Dynamics (IVD), Electronic Stability Program (ESP) ແລະ Dynamic Stability Control (DSC)
ມໍເຕີທົ່ວໄປ: StabiliTrak
Holden: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Hyundai: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP), ການຄວບຄຸມສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESC), ຄວາມຊ່ວຍເຫຼືອດ້ານສະຖຽນລະພາບຍານພາຫະນະ (VSA)
Infiniti: ຄວບຄຸມການເຄື່ອນທີ່ຂອງພາຫະນະ (VDC)
Jaguar: ການຄວບຄຸມສະຖຽນລະພາບແບບໄດນາມິກ (DSC)
ລົດຈິບ: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Kia: ການຄວບຄຸມສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESC) ແລະໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Lamborghini: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ທີ່ດິນ Rover: ການຄວບຄຸມສະຖຽນລະພາບແບບເຄື່ອນໄຫວ (DSC)
Lexus: Vehicle Dynamics Integrated Management (VDIM) ແລະ Vehicle Stability Control (VSC)
Lincoln: AdvanceTrac
Maserati: ໂປຣແກມຄວາມabilityັ້ນຄົງຂອງ Maserati (MSP)
Mazda: ການຄວບຄຸມສະຖຽນລະພາບແບບໄດນາມິກ (DSC), ການຄວບຄຸມການຂັບເຄື່ອນແບບເຄື່ອນໄຫວແບບເຄື່ອນທີ່
Mercedes-Benz: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Mercury: AdvanceTrac
MINI: ການຄວບຄຸມສະຖຽນລະພາບແບບໄດນາມິກ
Mitsubishi: MULTI-MODE Active Stability Control and Traction Control a Active Stability Control (ASC)
ນິດສັນ: ຄວບຄຸມການເຄື່ອນທີ່ຂອງພາຫະນະ (VDC)
Oldsmobile: ລະບົບຄວບຄຸມຄວາມແມ່ນຍໍາ (PCS)
Opel: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Peugeot: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Pontiak: Stabili Trak
Porsche: Porsche Stability Control (PSM)
Proton: ໂປຣແກມສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ
Renault: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ກຸ່ມ Rover: ການຄວບຄຸມສະຖຽນລະພາບແບບໄດນາມິກ (DSC)
Saab: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ດາວເສົາ: StabiliTrak
Scania: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ບ່ອນນັ່ງ: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
odakoda: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ອັດສະລິຍະ: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Subaru: ການຄວບຄຸມນະໂຍບາຍດ້ານພາຫະນະ (VDC)
Suzuki: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
ໂຕໂຍຕ້າ: Vehicle Dynamics Integrated Management (VDIM) ແລະ Vehicle Stability Control (VSC)
Vauxhall: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
Volvo: ສະຖຽນລະພາບແລະຄວບຄຸມແຮງດຶງ (DSTC)
Volkswagen: ໂຄງການສະຖຽນລະພາບທາງອີເລັກໂທຣນິກ (ESP)
